



RVS(机器人视觉系统)是一种人工视觉技术,可自动执行识别、处理和设定的中间步骤。
RVS无需人工干预,大幅简化了工件识别操作,使流程更快、更直观,降低了出错风险,并提高了整体效率。
该解决方案可在不影响成品质量的情况下提高生产效率。
其与P-Robot集成,RVS能够完全自主地搬运工件,从而提高了操作柔性,并能够搬运复杂几何形状或无法使用传统重力定位装置定位的工件。
该系统能获取周围环境的图像,并使用人工视觉对其进行解读。
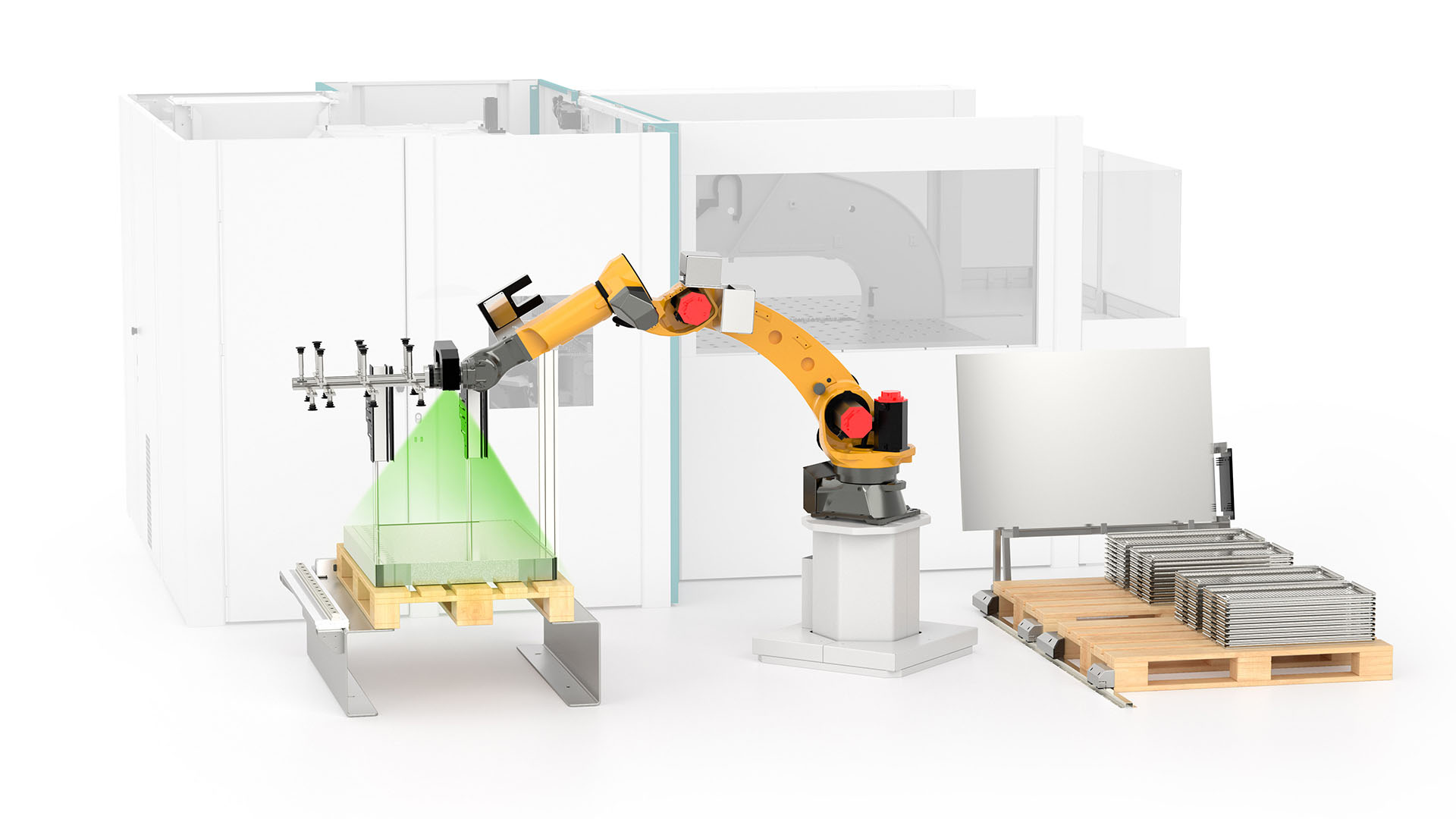
RVS能够:
- 识别工件,即使在无序码垛中也是如此
- 识别单个金属板材
- 无需物理参考即可识别托盘和码垛
- 实时共享所有信息,使多边折弯中心和机器人能够自动调整以保证精确的搬运和定位。
- RVS扫描上料工位,识别工件的几何形状,自动关联程序,并开始生产直至完成。
- 它非常适合处理无序堆叠的同种工件,并且可大幅缩短准备折弯材料的时间。


- RVS管理预先定义的工件列表,通过对上料工位进行简单定位,识别工件并按顺序拾取。
- 这非常适合预定的生产,以降低手动准备操作带来的风险。
- RVS扫描上料工位,自动识别工件并关联每个工件的程序,持续生产直至完成。
- 这非常适合P-Robot与上游系统集成的情况,可提供最大的生产柔性。


RVS是一款可选的人工视觉应用程序,可实时检查待生产的实际工件,并剔除不合格工件。
VISIO系统将采集的图像与参考DXF文件进行比较,确保质量并减少机器停机时间。生产结束时,系统会生成一份报告,总结已执行的检查。